Quoting Bray, "When we talk about points in `RR^2` or `RR^3,` we refer to a specific point with a set of coordinates. In `RR^2` we need two coordinates, and in `RR^3` we need three coordinates. These coordinates are defined by a set of conventions, defining a 'coordinate system' " (43).
The coordinate system that people are usually familiar with is the Cartesian Coordinate System. The Cartesian Coordinate System in `RR^3` pinpoints the location of a point by using the `x`, `y`, and `z` axes and providing the numerical value on each axis of where a particular point can be found. The reason why the Cartesian Coordinate System is used more frequently than other coordinate systems is because every point has a unique set of coordinates, and the coordinates do not overlap or repeat. There are times when other conventions may be more useful, which is why one might wish to convert from Cartesian coordinates to Spherical coordinates.
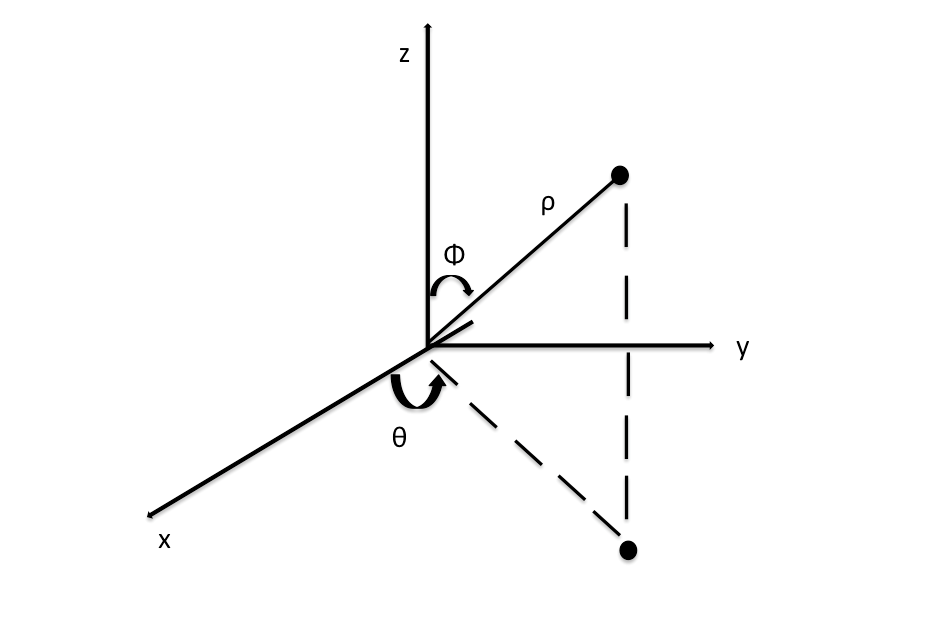
Given a point `(x, y, z)` in `R^3,` spherical coordinates are of the form `(rho, theta, phi)`, where:
- The coordinate `rho` is defined as `rho = sqrt(x^2 + y^2+z^2)`
- The coordinate `theta` is defined as `theta = tan^(-1) (y/x)`
- The coordinate `phi` is defined as `phi = cos^(-1)(z/rho)`
In the image located above, the coordinate `rho` is the distance from the point to the origin. The coordinate `theta` is the "angle from the positive part of the `x`-axis, moving counterclockwise to the position vector" of the point (Bray, 45). The coordinate `phi` is the "angle from the positive part of the `z`-axis to the position vector" of the point (Bray, 46).
You may notice that `theta` is defined in the same way for spherical coordinates as for polar coordinates]]. For this reason you may wish to visit our conversion equation from cartesian to polar coordinates.
Sources
Bray, Clark. Multivariable Calculus. Middletown, DE: n.p., 2015. Print.